Electrothermal Soft Manipulator Enabling Safe Transport and Handling of Thin Cell/tissue Sheets and Bioelectronic Devices
Kim BS, Kim MK, Cho Y, Hamed EE, Gillette MU, Cha H, Miljkovic N, Aakalu VK, Kang K, Son KN, Schachtschneider KM, Schook LB, Hu C, Popescu G, Park Y, Ballance WC, Yu S, Im SG, Lee J, Lee CH, and Kong H.
Science Advances 6 (42) 2020 6(42) 5630 https://doi.org/10.1126/sciadv.abc5630
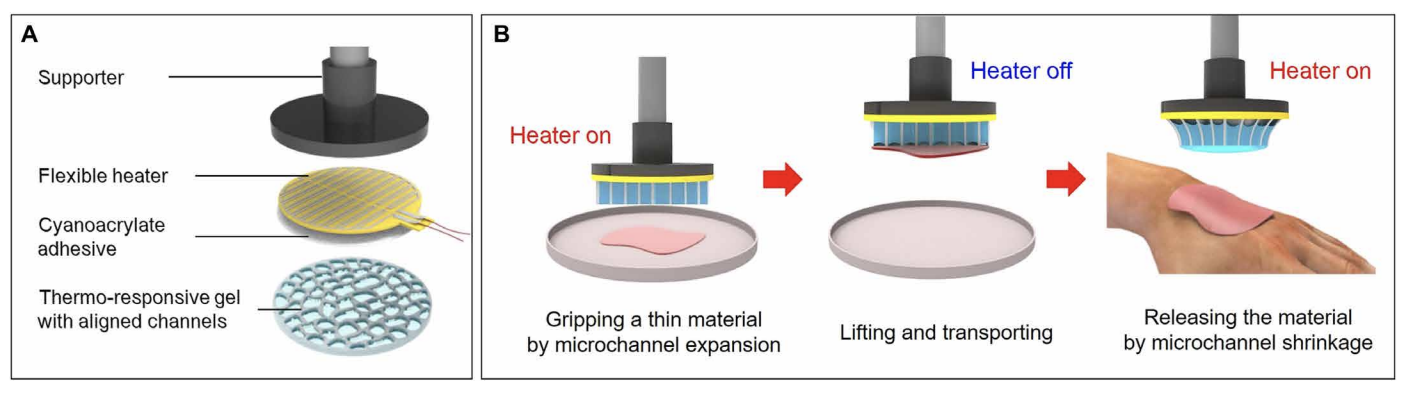
“Living” cell sheets or bioelectronic chips have great potentials to improve the quality of diagnostics and therapies. However, handling these thin and delicate materials remains a grand challenge because the external force applied for gripping and releasing can easily deform or damage the materials. This study presents a soft manipulator that can manipulate and transport cell/tissue sheets and ultrathin wearable biosensing devices seamlessly by recapitulating how a cephalopod’s suction cup works. The soft manipulator consists of an ultrafast thermo-responsive, microchanneled hydrogel layer with tissue-like softness and an electric heater layer. The electric current to the manipulator drives microchannels of the gel to shrink/expand and results in a pressure change through the microchannels. The manipulator can lift/detach an object within 10 s and can be used repeatedly over 50 times. This soft manipulator would be highly useful for safe and reliable assembly and implantation of therapeutic cell/tissue sheets and biosensing devices.